

This post gives examples of R2 unitary rotations and the equivalent multiplications.
A Double Rotation in R2 and its Equivalent Multiplication
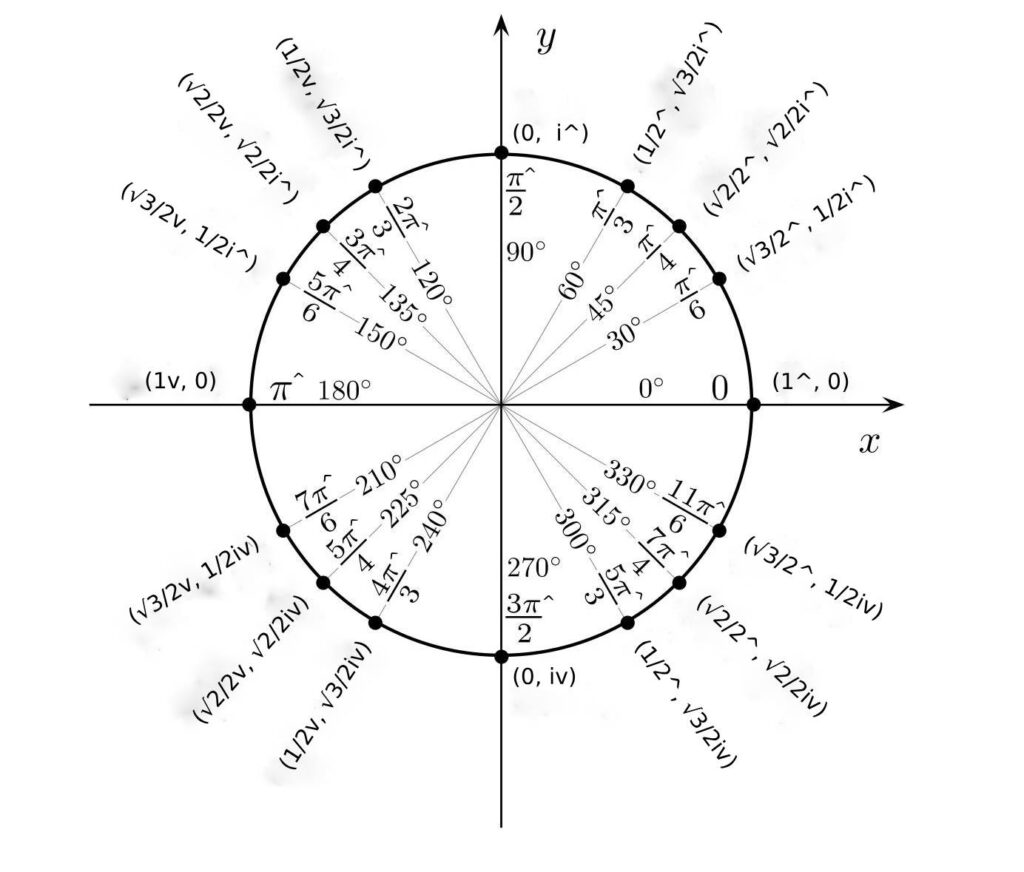
Take for example two rotations of 45^o around the z-axis from the point located at (1^, 0):
A rotation of π^/4 ↺ 1^ moves a point at 1^ to (√2/2^, √2/2i^). See this in the unitary circle above. A further second rotation moves the point from (√2/2^ + √2/2i^) to (0, i^). The movement can be calculated using the rotation operation. Alternatively, multiplication of the coordinates together gives the movement.
- π^/4 ↺ 1^ + π^/4 ↺ 1^ = (√2/2^ + √2/2i^)*(√2/2^ + √2/2i^)
- => π^/2 ↺ 1^= (√2/2^ + √2/2i^)2
- = (√2/2^)(√2/2^) + (√2/2^)(√2/2i^) + (√2/2i^)(√2/2^) + (√2/2i^)(√2/2i^)
- = (√2*√2/4^) + (√2*√2/4^)*i^+ i^*(√2*√2/4^) + (√2*√2/4i^2)
- = ½^ + ½i^+ ½i^ + ½v
- = i^
A Triple Rotation in R2 and its Equivalent Multiplication
Now let’s look at another example of three rotations in a row from the point 1^ by multiplication of the coordinates.
- π^/4 ↺ 1^ + π^/4 ↺ 1^ + π^/4 ↺ 1^ = (√2/2^ + (√2/2i^)3
- => 3π^/4 ↺ 1^ = i^(√2/2^ + √2/2i^)
- Note: (√2/2^ + √2/2i^)2 = i^ from last example
- = √2/2v + √2/2i^
Difference between Rotation and Multiplication in R2
Multiplication differs from the rotation operation in that the rotation operation describes the rotations, the point to be moved and the axis of rotation explicitly and is based on the addition of rotations. Multiplication treats the operand as a point that is moved by the operator. The magnitude and rotation form the operator and the result is a new location for the point.
Multiplication also differs from the rotation operation in that it does not refer directly to smaller rotations than 90o but uses fractions of i^, iv , 1^ or 1v. i^ represents a rotation of 90^o counterclockwise, iv a 90vo clockwise, 1^ represents no rotation or 0o and 1v a 180o rotation clockwise.
Smaller rotations are dealt with using the coordinates. For example, take the point at 150^o counterclockwise from 1^. Its coordinates are (√3/2v, 1/2i^). The algebraic representation of this is (√3/2v + 1/2i^) and this can be used in multiplication to rotate a point. Multiplying twice will give the equivalent rotation of 300^o counterclockwise.
- (√3/2v + 1/2i^)*(√3/2v + 1/2i^)
- = (√3/2v*√3/2v) + (√3/2v*1/2i^) + (1/2i^*√3/2v) + (1/2i^*1/2i^)
- = 3/4^ + √3/4iv +√3/4iv + 1/4v
- = 2/4^ + 2√3/4iv
- = 1/2^ + √3/2iv which are the same as the coordinates of 300^o
Conclusion
Try these examples of R2 rotation and multiplication with our online calculator.
Next: Complex Rotations
Previous: Universal Rules of Rotation